
ROBO-PARTNER Safe HRC in Assembly processes
|
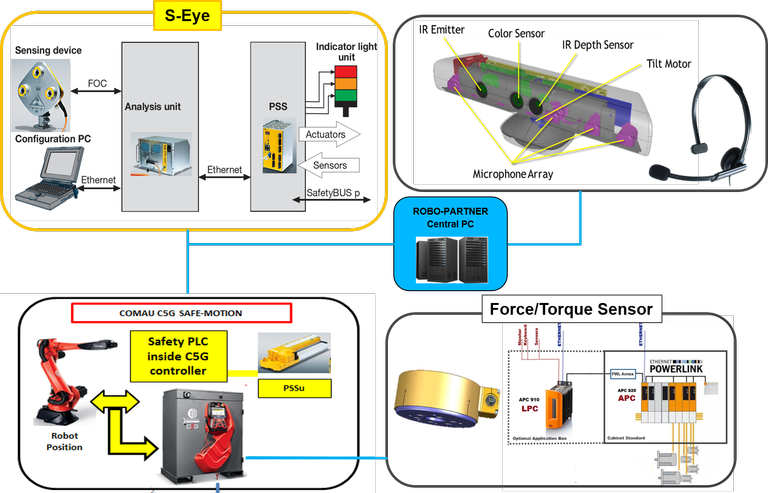
In recent years, several lines of research have dealt with physical human robot interaction1. A plethora of European projects2, 3, 4, 5 are addressing issues concerning human robot cooperation. However, current approaches make use of limited sensing capabilities that leads to restricted interaction between human and robots and to lack of confidence for the human operator with respect to his/her safety. ROBO-PARTNER project addresses Human Robot Cooperation based on anadvanced sensorial network capable of efficiently fusing the acquired data under intelligent algorithms that allow the real time control of process. In this direction,intelligent multimodal interfaces enhanced with new sensorial capabilities are being integrated in ROBO-PARTNER developments. Indicative examples are the use of:
Additionally, advanced control algorithms are used to regulate the manipulation of the parts by the robots and close the gap between the human and the robot in the assembly line. |
ROBO-PARTNER Safe Human Robot Collaboration in Assembly processes |
|---|
References
1. Bicchi A., Bavaro M., Boccadamo G., Carli D. De, Filippini R., Grioli G., Piccigallo M., Rosi A., Schiavi R., Sen S., and Tonietti G.. Physical Human-Robot Interaction: Dependability, Safety, and Performance. In Proc. 10th Intl. Workshop Advanced Motion Control, pages 9-14, 2008
2. CHRIS, 2008, Cooperative Human Robot Interaction Systems (CHRIS) project, http://www.chrisfp7.eu/
3. PHRIENDS, 2011, Physical Human-Robot Interaction: DepENDability and Safety (PHRIENDS) project, http://www.phriends.eu
4. PISA, 2006, Flexible Assembly Systems through Workplace-Sharing and Time-Sharing Human-Machine Cooperation (PISA) project, http://www.pisa-ip.org/
5. SAPHARI, 2011, Safe and Autonomous Physical Human-Aware Robot Interaction project, http://www.saphari.eu/
