
ROBO-PARTNER Intralogistics Mobile Assistant Unit & Overhead Robot
|
Nowadays, in intra-logistics operations, human labor is still used for transportation using handcarts and forklifts. High labor cost and risk of injury are the undesirable consequences1. Alternative approaches in automated warehouses are fixed installed conveyors installed either overhead or floor-based which lack of flexibility, which is necessary when the production lines of the company change1. Another approach for the problem of autonomous transport of materials is the use of Automated Guided Vehicles (AGVs) 2, 3. This technology though, lacks of flexibility due to the heavy installation requirements and the rigidity of fixed navigation pathways2. ROBO-PARTNER project, aims at the introduction of mobile unit and/or mobile manipulators that act as assistants to the operatorsduring the assembly in order to enable autonomous resources that can provide the operator with the correct part/tools at the right place. Functionalities such as:
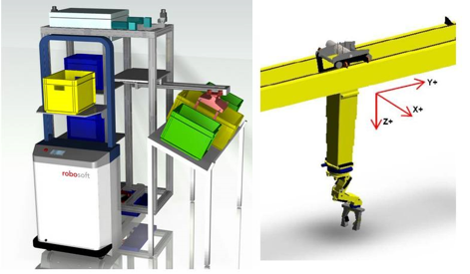
are under development. Two categories of robots are considered: mobile platforms customized in order to serve human operators in an assembly line and an overhead robot with high payload able to follow a human in an intelligent and safe way. |
ROBO-PARTNER Intelligent Mobile Assistant Unit and Overhead Robot |
References
1. D. Sun, A. Kleiner, C. Schindelhauer, “Decentralized hash tables for mobile robot teams solving intra-logistics tasks”, Proceedings of the 9th International Conference on Autonomous Agents and Multiagent Systems, (Vol. 1, 2010), pp. 923-930.
2. C. Coma, M. Confente, M. Govemo, P. Fiorini, “An Autonomous Robot for Indoor Light Logistics”, Proceedings of 2004 IEEElRSJ International Conference on Intelligent Robots and Systems, (Vol. 3, 2004), pp. 3003-3008
3. S. G. M. Hossain, Muhammad Yakut Ali, Hasnat Jamil, Md. Zahurul Haq, “Automated Guided Vehicles for Industrial Logistics – Development of Intelligent Prototypes Using Appropriate Technology”, Computer and Automation Engineering (ICCAE) (Vol. 5, 2010)
