
ROBO-PARTNER Integration and Communication Architecture
 ROBO-PARTNER Integration and Communication Architecture
|
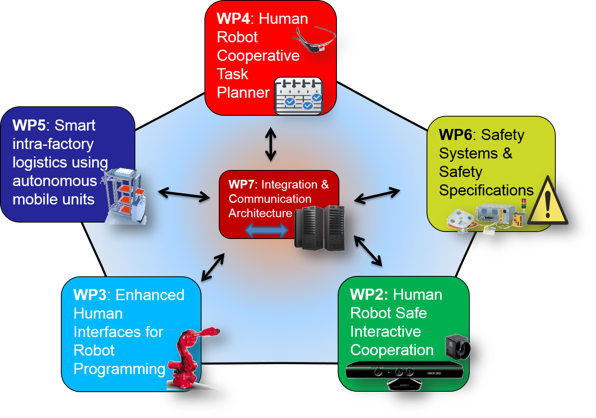
According to the latest industry-based reports the biggest challenge identified for robotics research and developers still remain the software solutions1. Moreover, the lack of standard ways of interfacing with sophisticated sensors in integration architectures remains a major problem. The aforementioned problem also stresses the need for international open standards, which are currently missing. ROBO-PARTNER project aims to avoid the “hard coded” inflexible conventional integration ways that are currently dominant in industrial environments. Inflexible approaches such as LANs oriented to specific industrial requirements and applications based in PLC programming are often the case in industry. To address the integration problem, the ROBO-PARTNER project aims to introduce and exploit a more flexible integration and communication system that is scalable, efficient and flexible. The ROBO-PARTNER Integration and communication architecture follows a distributed and scalable architecture model which is flexible and robust. The ROBO-PARTNER integration and communication architecture offers services in order to properly distribute both the control and sensor data to every relevant resource, networking and coordinating the manufacturing resources according to the optimized schedule produced by the ROBO-PARTNER Task Planner. Moreover the ROBO-PARTNER Integration and Communication architecture, gathers, correlates and analyses data using a detailed ontology model in order to provide real time monitoring and information that allows the ROBO-PARTNER Task Planner to take real-time informed decisions for optimal production scheduling. |
References
1. Forge F., Blackman C., A Helping Hand for Europe: The Competitive Outlook for the EU Robotics Industry, JRC Scientific and Technical Reports, 2010, ISBN 978-92-79- 17657-9
