ROBO-PARTNER Human Robot Cooperative Task Planner
|
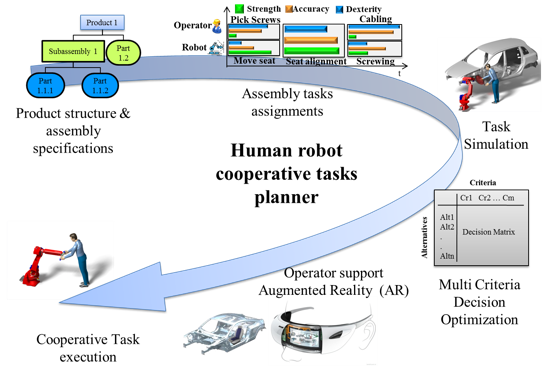
Task Planning is a key concept for achieving Human Robot collaboration and ensuring highly efficient production execution in terms of cost and time1. The disadvantages of the current proposed approaches2 lies in their lack of using efficient heuristics and multi criteria based task assignments. With respect to the commercial simulation tools used for planning3, 4, 5, 6 need to be entered manually as input making the modelling process highly consuming. ROBO-PARTNER project develops robust methods and software tools for determining the optimal planning of assembly/ disassembly operations. In more details, such tools will be used for:
Ergonomics, resource utilization and safety will be the prevailing criteria in order to design the hybrid solutions. Last but not least, operator support will be provided through advanced Augmented Reality technology, such as:
|
ROBO-PARTNER Human Robot Cooperative Task Planner |
References
1. Tan, J.T.C., Duan, F., Kato, R., Arai, T., 2010, Collaboration Planning by Task Analysis in Human-Robot Collaborative Manufacturing System, In Ernest Hall, “Advances in Robot Manipulators”, InTech.
2. Chen Fei, Kosuke Sekiyama, Huang Jian, Sun Baiqing, Sasaki Hironobu, Fukuda Toshio, (2011),"An assembly strategy scheduling method for human and robot coordinated cell manufacturing", International Journal of Intelligent Computing and Cybernetics, Vol. 4 Iss: 4 pp. 487 - 510
3. CATIA, http://www.3ds.com/products/catia/welcome/
4. DELMIA, http://www.3ds.com/products/delmia/solutions/all-delmia-solutions/
5. GAZEBO. http://gazebosim.org/
6. PLANTSIMULATOR, http://www.plm.automation.siemens.com/en_us/products/tecnomatix/plant_design/plant_simulation.shtml
